





- Manual de Haggloader (Escavadeira contínua)
- Haggloader técnico da China comparado com o Germany 312
- Descrição da operação do haggloader
- Manutenção do haggloader
- Notas operacionais do haggloader na China
- Estercar estrada cabeçalho Manua
- Descrição técnica do Roadheader
- Manutenção da Road header
- Notas do road header
- Operação do Road header
- Manual de carro de transporte de mina
- Manutenção dos vagões
- Utilização dos vagões
- Descrição dos vagões
- Notas dos vagões
- Manutenção da Locomotiva elétrica na China
- Maintenance of Jumbo de perfuração frontal hidráulico
- Completar o programa de Design de encapsulamento
- Configuração de tunelamento 1
- Configuração de tunelamento 2
- Configuração de tunelamento 3
- Configuração de tunelamento anti explosão 4
- Configuração de tunelamento 5
- Configuração de tunelamento anti explosão para minas de carvão 6
- Configuração de tunelamento 7
- Configuração de tunelamento anti explosão 8
Descrição técnica do Roadheader
A. Sistema hidráulico
Breve descrição: Todos os roadheader série EBH45 são acionados hidraulicamente. Ele é alimentado por um motor elétrico com uma potência de 75 kW e este motor aciona os dois conjuntos de bombas variantes :
(1) Ambos os conjuntos de bombas de óleo bombeado separadamente em dois circuitos hidráulicos independentes.
(2) Bomba Frontal - é a ação da bomba de pistão de deslocamento variável sensível da variabilidade. Através dos controlos de válvula de controlo do movimento da máquina , ele cilindros grandes e pequenas setas , a rotação do motor de transporte , rodas de roquete , a redução do mecanismo de cilindro de carga e as pernas traseiras da máquina .
(3) traseira da bomba variabilidade responsável pela rotação da ponta de corte .
1. Funcionamento do Sistema hidráulico
(1) Mecanismo de Movimento
(2) A rotação da roda de catraca
(3) Rotação da roda dentada
(4) A rotação dos bits de corte
(5) O movimento da cabeça de corte para cima e para baixo, esquerda e direita
(6) Aumentar e baixar a caçamba
(7) A subida e descida das pernas traseiras da máquina.
2. Bomba e Sistema hidráulico
As bombas são acionadas por um motor elétrico com 75 kW. Através das válvulas de controle de pressão, a pressão é distribuída uniformemente sobre o corte, o transporte, o mecanismo de condução, todos os motores hidráulicos e cilindros.
No total, a máquina é equipada com nove cilindros, cilindros de corte crescimento (3 unid.), Levantamento de cilindros (2 unid.), Cilindros de inclinação (2 unid.) e cilindros de elevação pilares traseiros (2 unid).
3. Painel de controlo
(1) O painel de controle está equipado com alavanca de controle, medidores de pressão, temperatura do óleo e termômetro de água.
(2) Controla o movimento de todos os cilindros de petróleo e motores hidráulicos que utilizam alavancagem.
(3) Mostra todos os dados necessários sobre a temperatura e pressão de óleo.
4. Carregamento e circuito de transporte
(1) A roda dentada do motor é impulsionada por bombas de pistão variável. Sua pressão é regulada por um motor hidráulico da bomba de óleo. Pressão aplicada - 20 MPa.
(2) O transportador do motor é acionado por bombas de pistão variável de potência constante. Sua pressão é regulada por um motor hidráulico da bomba de óleo. Pressão aplicada - 25 MPa.
(3) A inversão de carga da válvula e o mecanismo de transporte são colocados sob o painel de controle. Mecanismos e dados de rotação anti-horário são operados por um controle de alavanca.
5. Circuito de transporte
(1) O mecanismo de condução opera por bomba de pistão variável. Ambos os motores hidráulicos são responsáveis pelo movimento e a direita para a esquerda com o óleo extraído a partir das bombas. Pressão aplicada - 31,5 MPa.
(2) O grupo da válvula de reversão do Motor hidráulico está integrado na válvula de controle multi tandem.
6. Circuito piloto
(1) Todas as operações da máquina são controladas por meio de válvulas de controle.
(2) Um total de 13 válvulas de controlo de carro.
(3) O circuito de controlo consiste em uma válvula de controlo, um filtro e de segurança principal.
(4) Pressão configurada: 3.5 MPa.
7. Circuito do Sistema hidráulico
(1) O sistema de cilindros hidráulicos acionados por uma bomba de pistão variacional.
(2) Duas bombas de rotação controlada de forma independente dos bits de corte, três cilindros da lança de corte e prateleiras traseiras.
(3) Pressão de rotação - de 29,5 MPa, a pressão do cilindro - 27 MPa.
(4) Circuito hidráulico auxiliar provido de um bloqueio hidráulico
B. Sistema de refrigeração spray
Principio do Sistema de refrigeração spray.
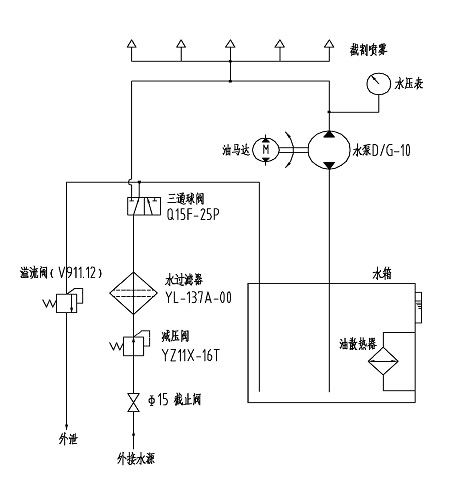
Principio do Sistema de refrigeração spray
(1) A cabeça de corte tem nove bocais de pulverização.
(2) Antes de entrar no tanque de água, água de refrigeração passa por uma válvula redutora de pressão e filtro. Em seguida, a água a alta pressão é pulverizada a partir do tanque.
(3) Quando a pressão externa da água excede 1,5 MPa, a água pode ser pulverizada sem a aplicação da bomba de água e do motor.
Nota:
O motor hidráulico tem de trabalhar quando a temperatura do óleo hidráulico é alta. Isto pode reduzir a temperatura do óleo para níveis normais.