





- Chargeur DéblayeurManuelle
- Description Technique du Chargeur Déblayeur
- Description d'opération du Chargeur Déblayeur
- Maintenance du Chargeur Déblayeur
- Note d'opération du Chargeur Déblayeur
- Déblayage manuel en-tête Road
- Description Technique de la Machine à Attaque Ponctuelle
- Maintenance de la Machine à attaque ponctuelle
- Notas de la máquina de ROADHEADER
- Método de funcionamiento la máquina de ROADHEADER
- Mine navette voiture manuel
- Maintenance des Navettes minières
- Utilisation de la Navette minière au tour
- Description technique de la Navette minière
- Notes sur la navette minière
- Maintenance de la Locomotive
- Maintenance of Perforateur géant hydraulique
- Compléter le Tunneling de conception du programme
- Option 1, Conception du programme de tunnel
- Programme de Tunnel , Option 2
- Programme de tunnel, Option 3
- Conception d’excavation de tunnels, Option 4
- Excavation de mine par explosion, Option 5
- Mine de charbon à explosion, Option 6
- Construction de tunnel, Option 7
- Mine à explosion souterraine, Option 8
Description Technique de la Machine à Attaque Ponctuelle
A. Système Hydraulique
Introduction brève : Toutes les machines à attaque ponctuelle EBH45 sont menées par un système hydraulique. Et cet ensemble utilise un système variable hydraulique. Son système hydraulique est directement actionné par un moteur électrique de 75 kW et ce moteur peut directement mener deux ensembles de pompe variable :
(1) Les deux ensembles de pompe variable fournissent séparément l’huile à deux circuits hydrauliques pétroliers indépendants.
(2) la pompe frontale a la charge de la pompe à piston à déplacement variable. Par une valve pilote, on contrôle le mouvement de la machine, le cylindre du grand et du petit bras de coupe, le cylindre de la déviation coupant le bras, la rotation du moteur de transporteur et la roue en étoile, l'extension et la rétractation du cylindre de la plaque de le pelle et le soutien arrière .
(3) La pompe arrière à piston à déplacement variable contrôle la rotation de la tête coupante.
1. Fonction du Système hydraulique
(1) Transport de la machine à attaque ponctuelle.
(2) Rotation de la tête coupante.
(3) Rotation de la roue en étoile.
(4) Actionnement du mécanisme de transport.
(5) Tout les mouvements de déplacements de la tête coupante.
(6) Montée et Descente de la plaque de la pelle.
(7) Montée et descente du système d’appui vertical.
2. Pompe à huile et Moteur Hydraulique
La station de pompe est mener par un moteur électrique de 75 kW. Par la combinaison de la pompe pétrolière variable et de la valve de groupe pilote, la pression est séparément envoyée au mécanisme de coupe, au mécanisme de chargement, au mécanisme de transport, à tout les cylindres du moteur et au dispositif d’appui vertical hydraulique arrière.
Il y a 9 cylindre au total sur cette machine: cylindre de travil du bras de coupe (3 pcs), cylindre de levage (2 pcs), cylindre de coup( (2 pcs) et cylindre de levage du dispositif d’appui vertical arrière (2 pcs).
3. Console
(1) La console est montée avec la barre d'exploitation, l'indicateur de pression, l'indicateur de température pétrolière et le thermomètre d'eau.
(2) Contrôler les mouvements de tous les cylindres pétroliers et des moteurs hydrauliques avec les barres d’exploitation.
(3) La pression et température de tous les circuits pétroliers peuvent être détectées par l'indicateur de pression et le thermomètre.
4. Circuit de transport et de chargement
(1) Le moteur de la roue en étoile(circuit de transport et de chargement) est conduite par la pompe à piston à déplacement variable. Et son moteur hydraulique est contrôlé par l'huile de la pompe. Mettez la pression 20 MPA.
(2) Le moteur de transporteur est conduit par la pompe à piston à déplacement variable à puissance constante. Et son moteur hydraulique est contrôlé par l'huile de la pompe. Mettez la pression 25 MPA.
(3) La valve arrière du mécanisme de chargement et transport est montée sous la console. Le sens horaire ou anti-horaire du mécanisme de chargement et le transport sont gérés par la barre d’opération.
5. Circuit de Transport
(1) Le circuit de transport est géré par la pompe à piston à déplacement variable. Et les deux ensembles du moteur hydraulique qui contrôle séparément le transport gauche et droit sont contrôlés par la pression de l'huile de la pompe. Mettez la pression 31.5 MPA.
(2) La valve de groupe de réversion du moteur hydraulique est intégrée à la valve multi tandem pilote. Le cœur de la valve est contrôlé par le contrôle à la valve pilote.
6. Circuit Pilote
(1) Toutes les opérations de machine sont faites par des valves pilotes.
(2) Il y a 13 pilote de valves d'exploitation en tout.
(3) L’ensemble de provision pétrolières pilotes incluent la valve source pétrolière pilote, le filtre pilote et la valve pilote de sécurité.
(4) Mettre la pression 3.5 MPA.
7. Circuit des Cylindres Hydraulique
(1) Le circuit de cylindre hydraulique est à la charge de la pompe à piston à déplacement variable.
(2) L'huile de la pompe contrôle séparément la rotation, le trois cylindre pétrolier du bras de coupe, le cylindre pétrolier de la plaque de la pelle et l’appui vertical arrière.
(3) Mettre la pression pour la rotation sur 29.5 MPA et mettre le cylindre pétrolier à 27MPa.
(4) Une serrure hydraulique est montée dans le circuit d'assistance hydraulique.
B. Système de refroidissement
Le principe du système de refroidissement est représenté sur l’image ci-dessous.
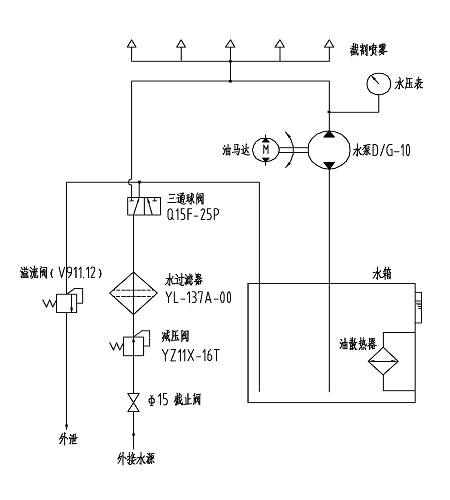
Principe du système de refroidissement
(1) Il y a neuf becs dans le support du vaporisateur de derrière la tête de coupe.
(2) Le vaporisateur rafraîchissant à eau doit réduire la pression de la valve et filtrer pour aller au réservoir d'eau. Sous la pression de la pompe à eau, l'eau se rafraîchie dans le réservoir d'eau et peut être vaporiser.
(3) Quand la pression externe de l'eau est au-delà de 1.5MPa, l'eau peut être vaporisée du bec directement sans avoir besoin du moteur ou de la pompe à eau.
Note :
le moteur pétrolier doit marcher quand la température pétrolière hydraulique est haute. Ceci peut réduire la température pétrolière hydraulique et contrôler la température pétrolière dans une gamme raisonnable.